
Каталог подводных военных роботизированных аппаратов
Каталог подводных военных роботизированных аппаратов -- Подводные военные роботы
см. также Каталог подводных роботизированных аппаратов
Принято делить беспилотные (необитаемые) аппараты, используемые на флотах (военно-морскими силами) на телеуправляемые и автономные. В 2016 году широко представлены и те, и другие виды аппаратов.
По форм-фактору можно различать устройства, схожие с подводными лодками, батискафами, торпедами, глайдерами, а также роботизированные всплывающие капсулы. Существуют также роботизированные подводные мины, "настроенные" на ту или иную военную технику, например, на корабль определенного классаа или даже на конкретную модель.
По назначению подводные военные аппараты делятся на устройства для обследования морского дна и других объектов - автономно или в режиме телеуправления. Одна из основных задач - противодействие минированию, обнаружение, классификация и локализация мин. Также идут разработки ударных подводных роботов. Есть гибридные разработки - робот сам по себе не вооружен, но в необходимый момент может активировать полезную нагрузку того или иного типа (как, например, робокапсулы над которыми работают по заказу DARPA).
Терминология
АНПА - автономный необитаемый подводный аппарат
СПА - самоходный подводный аппарат
ТНПА - телеуправляемый необитаемый подводный аппарат
AUUV (Autonomous Unmanned Undersea Vehicle) - автономный необитаемый подводный апарат
LDUUV - телеуправляемая необитаемая подводная лодка
OSMDWS (One-Shot Mine Disposal Weapon System) - одноразовые системы для уничтожения мин
UUV (Unmanned Undersea Vehicle) - необитаемый подводный аппарат
Российские
Следует отметить, что многие из аппаратов, которые в списке ниже указаны, как разработка компании "Тетис-Про", Россия, на деле - это закупленные за рубежом аппараты, которые прошли ту или иную "адаптацию" для использования в России. На деле - это безусловно зарубежные разработки, которые нельзя считать российскими.
Апппараты по названию
- Александри-ИСПУМ-Э, см. ГНПП Регион
- Амулет, см. Рубин (ЦКБ Рубин)
- Витязь-Д, Рубин (ЦКБ МТ Рубин)
- Гавия (Gavia), в Россию попадал через Тетис-Про, производитель Teledyne, Исландия
- Гармония, см. Комета (Корпорация космических систем специального назначения "Комета", Россия)
- Глайдер (Морская тень), см. Океанос, Россия
- Дельфин, один из аппаратов, попадавших в Россию через Тетис-Про. Производитель неизвестен редакции
- Клавесин-1Р, см. ИПМТ ДВО РАН, Россия
- Клавесин-2Р-ПМ, см. Рубин, Россия
- МагМастер, MarineFeoService, Россия
- Марлин-350 см. Тетис-Про, считается аппаратом российского производства
- Морская тень (он же Глайдер), см. Океанос, Россия
- Нерпа, см. ЦНИИточмаш и МАКО (предприятия Ростех), Россия
- Обзор, см. ОАО Тетис Про, Россия,
- Пантера Плюс, см. ОАО Тетис Про, Россия
- Пингвин, см. МАКО (НПГ МАКО), Россия
- Позиционер, см. Океанприбор, Россия, С.Петербург
- Скиф, см. производитель неизвестен
- Статус 6, см. производитель неизвестен
- Суррогат, см. Рубин
- Тайгер, поставка и "адаптация" под российского заказчика - ОАО Тетис Про. Производитель SaaB, Швеция
- Фалкон (Фалькон), см. ОАО Тетис Про. Производитель SaaB, Швеция
- Фугу, см. МАКО
- Цефалопод, см. Рубин
Аппараты по производителю
ГНПП Регион (входит в Корпорацию Тактическое ракетное вооружение, КТРВ)
Александрит-ИСПУМ-Э
ТНПА, предназначенный для оснащения кораблей противоминной обороны поекта Александрит (12700).
Глубины - до 10-300 м. Способен обнаруживать, буксировать и уничтожать подводные объекты, включая морские мины разнгых типов.
Скорость 3-6 м/c, дистанция управления - до 500 м, может работать при волнении моря до 3 баллов.
Впервые представлен на салоне МВМС-2019 в С.-Петербурге в 2019 году.
2019.07.14 . фото, спецификация.
2020.05.15 В Средиземном моде ВМФ России отработали действие глубоководных дронов. /
ИПМТ ДВО РАН, Россия
Клавесин-1Р, ИПМТ ДВО РАН, Россия

Комплекс на базе этого НПА по состоянию на 2016 год уже несколько лет стоит на вооружении ВМФ, используется в исследовательских и разведывательных целях. Может снимать и картографировать дно, искать затонувшие объекты.
Комета (Корпорация космических систем специального назначения "Комета", Россия)
Подводная система гидроакустического слежения, разворачиваемая Россией на базе подводных роботизированных комплексов. Предназначена для обнаружения кораблей, подводных лодок и низколетящих самолетов и вертолетов в различных районах Мирового океана.
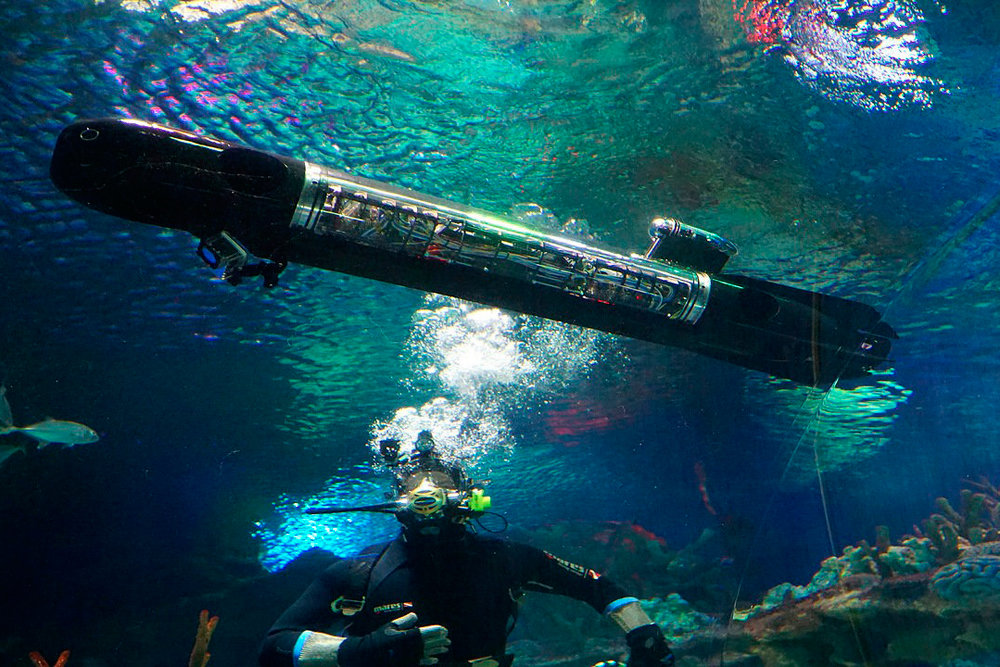
МАКО (НПГ МАКО), Россия

фото: Научно-производственная группа МАКО
Автономный надводно-подводный роботизированный комплекс.
Фугу, МАКО, Россия
Беспилотный роботизированный комплекс с автономными необитаемыми подводными аппаратами глайдерами, предназначенный для передачи сигналов боевого управления стратегическим и ракетным атомным подводным лодкам, сбор информации об условиях мореплавания в районах боевого патрулирования. Аппарат состоит из подводной и надводной частей. Свободно поворачивающиеся плавники, используя энергию набегающей волны двигают подводную и буксируют надводную части устройств. На надводной части стоит система спутниковой связи, станция для сбора океанографических и метеорологических данных. Питание аккумуляторы аппарата получают от "солнечной батареи". Подводная часть оснащена миниатюрными гидролокаторами, а также гидроакустическим модемом, способным обеспечивать канал связи с АПЛ.
2016.10.14 ВМФ начал получать новейшие комплексы для связи с подлодками в океане. Основная партия комплексов будет поставлена в 2018 году в рамках перехода на технологии связи 6-го поколения. /
2016.09 Российские атомные подлодки оснастят роботами-беспилотниками. Статус - испытывается Главным научно-исследовательским испытательным центром робототехники Минобороны РФ (ГНИИЦ РТ) /
Океанос, Россия
Глайдер (Морская тень)
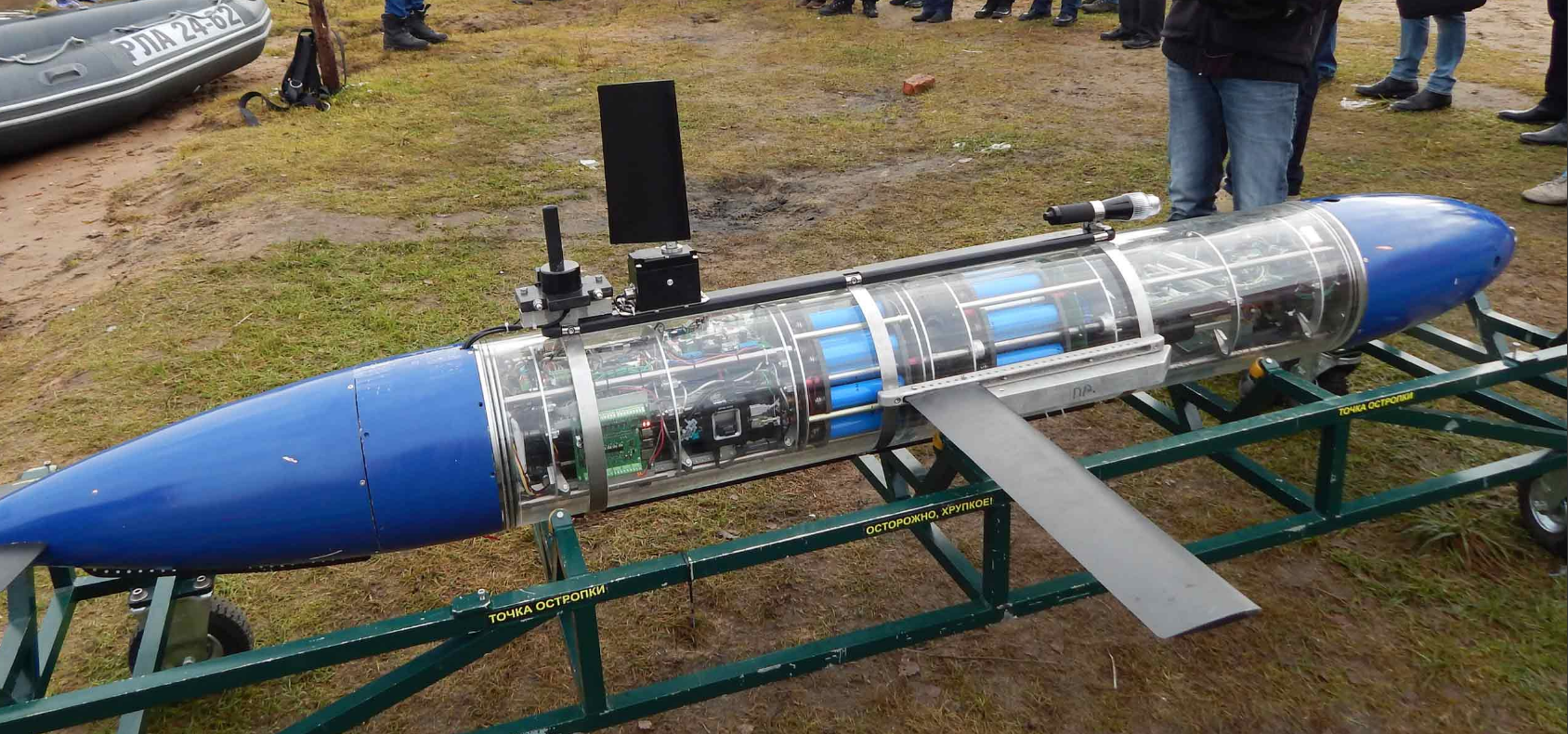
фото: ЗАО "Научно-производственное предприятие подводных технологий Океанос"
Автономный необитаемый подводный комплекс планерного типа (глайдер). В состав комплекса входят: исследовательский глайдер, глайдер-носитель мини-аппаратов, глайдер-ретранслятор, корабельный пункт управления и средства ретрансляции. Впервые представлен в 2017 году. Может вести поисковые работы, глубоководную разведку. Аппарат двойного назначения. Испытывается в составе перспективных подводных комплексов ВМФ РФ в 2016 году.
Океанприбор, Россия, С.Петербург
Система навигации и связи. Построена на базе АНПА и гидроакустических буев, подключающихся через спутники Гонец-Д1М к командному центру. Буи будут плавающими, подводными и вмораживаемыми. Буи работают с ГЛОНАСС, что позволяет им определять свое точное местоположение, а также уточнять местоположение АНПА, которые якобы способны патрулировать глубины до 8 км. Эта информация нуждается в уточнении. Буи оборудованы поддержкой связи с АНПА. Буй может работать в одном из трех режимов:
1. Получать информацию от спутника и передавать его по требованию АПА.
2. Буй может связать различные центры управления (наземные, воздушные, морски и т.п.) с АНПА в режиме реального времени. В таком режиме можно непосредственно управлять АНПА (режим телеуправления)
3. АНПА действует автономно, но способен сверяться с буями для коррекции курса. При необходимости АНПА может подать через буй сигнал тревоги.
Система готова к развертыванию. В декабре 2016 года заявляется о готовности системы и планах ее развертывания на арктическом шельфе.
Рубин (ЦКБ Рубин), Россия
АНПА "Амулет", фото ЦКБ "Рубин",
Витязь, ЦКБ МТ Рубин, Россия

Витязь-Д - комплекс для глубоководных подводных исследований. Включает АНПА СГП, глубоководную донную станцию, поверхностный блок управления. Связь с судном-носителем происходит онлайн по гиброакустическому каналу. В 2020 году успешно выполнил погружение на дно Мариинской впадины.
Клавесин-2Р-ПМ, Рубин, Россия
Необитаемый подводный аппарат с поддержкой автономности (АНПА). Роботизированный комплекс, предназначенный для подводных работ - обслуживание буровых установок, изучение морского дня, наблюдение за линиями подводных коммуникаций. Для работы на глубинах до 6000 метров.
Подводный АНПА, робот-цель, способный имитировать различные подводные лодки. На декабрь 2016 года - в статусе "в разаботке". Призван позволить отказаться от использования в качестве учебных целей действующих подводных лодок, что является избыточно дорогим. Будет способен имитировать атомную и дизель-электрическую подводные лодки, воспроизводя, в частности, их маневрирования.
Цефалопод, Россия
2020.08.25 В Military Watch оценили подводный дрон Цефалопод. Вооружен 324-мм торпедами, которыми можно атаковать подводные лодки. Фото.
2015.11.29 . В ее рамках исследуется возможность создания робототехнических комплексов с автономными необитаемыми подводными аппаратами повышенной автономности. Оценки расходов на НИР - от 2.5 до 8 млрд руб. В качестве соисполнителей называются "Моринформсистема-Агат"; "Морское подводное оружие - Гидроприбор"; ОКБ Новатор (из ВКО Алмаз-Антей); ОКБМ им.Африкантова, Нижний Новгород; завод Машиностроитель, Пермь. / droneshub.ru
Производитель редакции неизвестен
Скиф, Россия (вероятно часть проекта Статус 6)
Canyon в классификации НАТО. Российская беспилотная ударная подводная лодка стратегического назначения. Может нести на борту ядерное вооружение, преодолевать большие расстояния. Информация не является достоверной, т.к. проект засекречен по состоянию на октябрь 2016 года.
Подводная многоцелевая система, вооруженная в том числе самоходными подводными аппаратами с ЯО на борту. Обитаемая подводная лодка, оснащенная несколькими (до 6) СПА (самоходными подводными объектами), каждый из которые может нести ЯО мегатонного класса в качестве полезной нагрузки. На декабрь 2016 распростарняется информация о проведенных испытаниях.
Тетис-Про
Гавия (Gavia), Teledyne (создан в компании Harfmynd, Исландия), США / (адаптация Тетис-Про)

АНПА, созданный в Исландии компанией Hafmynd ehf. Создан до 2010 года. Использовался ВМФ РФ под названием "Гавиа". Закупался в РФ через ОАО "Тетис Про".
Дельфин, ОАО Тетис Про, Россия
АНПА. Создан до 2013 года. Принят на вооружение. Степень "российскости" - под большим вопросом.
Марлин-350, ОАО Тетис Про, Россия
ТНПА. Используется в гражданских и в военных целях.
2017.03.14 До конца 2017 года "поисково-спасательные силы" ВМФ РФ примут в свой состав 12 роботов-подводников Марлин-350.
2016.10.14 Робот Марлин-350 задействовали при обследовании самого глубокого в России карстового Голубого озера. При осмотре одной из глубоководных пещер, робот достиг глубины 279 метров - теперь это считается самой глубокой точкой озера. Опуститься глубже пока не получается из-за нулевой видимости. /
Обзор, ОАО Тетис Про, Россия
ТНПА. Создан до 2013 года. Принят на вооружение. Степень "российскости" - под вопросом.
Пантера Плюс, ОАО Тетис Про, Россия
ТНПА. Создан до 2013 года. См. Seaeye Panther Plus, SAAB, Швеция. Не является российской разработкой. Закупался в Швеции Россией в начале 2000-х.
Принят на вооружение ВМФ РФ, например, такой робот эксплуатирует судно "Коммуна", спасательное судно Черноморского флота в 2017.06.
Тайгер, ОАО Тетис Про, Россия (Seaside Tiger, SAAB, Швеция)

ТНПА. Создан до 2013 года. Принят на вооружение. Не является российской разработкой.
Фалкон (Фалькон), ОАО Тетис Про, Россия (Seaeye Falcon, SAAB, Швеция)

Seaeye Falcon, SAAB
ТНПА (ROV). Seaeye Falcon используется в мире с 2002 года. Принят на вооружение в ВМФ РФ. Не является российской разработкой.
ЦНИИточмаш и МАКО (предприятия Ростех), Россия
Нерпа
В августе 2018 года Ростех продемонстрировал прототип подводного беспилотного аппарата, оснащенного стрелковым оружием (АПС). Робот уже прошел первые испытания (без оружия на борту). Стоимость разработки в корпорации обозначили в 10 млн руб. В Ростехе ищут заказчика на свое изделие, чтобы доработать его под реальные потребности. Декларируется, что аппарат предназначен для охраны мостов и боевых кораблей от террористов. Предполагается, что максимальная глубина погружения аппарата будет достигать 50 м, дальность устойчивой связи с ним - до 80 метров. Вес аппарата - менее 30 кг, скорость хода - 1 узел, запас хода - 4 часа. | 2018.08.21 (есть фото)
Marine Geo Service, Россия
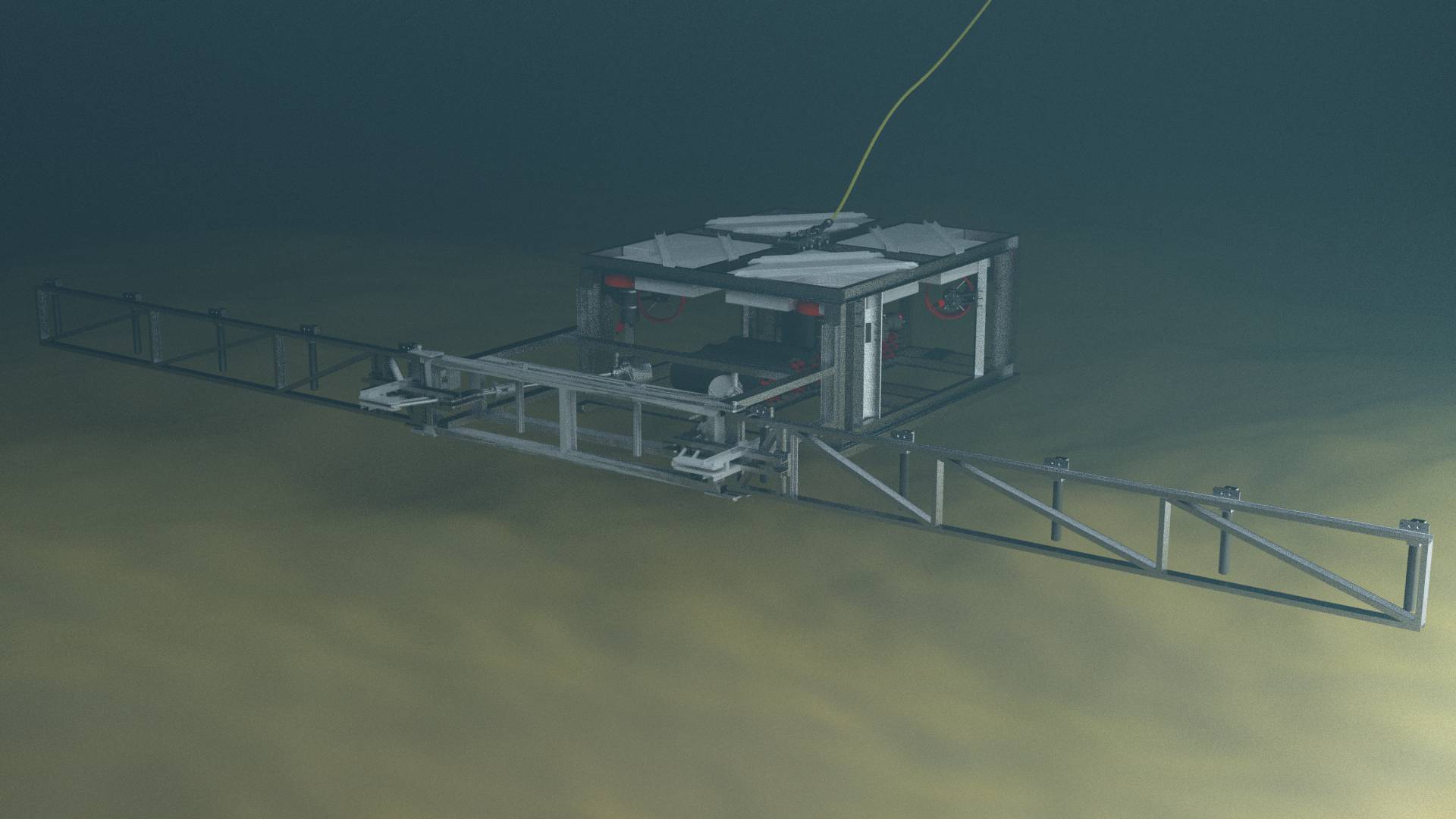
ТНПА легкого рабочего класса, мощностью 35 кВт, предназначенный для выполнения площадных гидромагнитных съемок с целью поиска взрывоопасных предметов (ВОП / UXO) вдоль трасс трубопроводов, кабельных линий и так далее. Может также использоваться для выпонения задач по визуальной идентификации и устранения остаточной минной опасности. Оснащен складной ферменной конструкцией для размещения феррозондовых датчиков
Зарубежные
- A9-M, ECA Group, Франция
- A27-M, ECA Group, Франция
- BioSwimmer (BILIS), Boston Engineering, США
- Bluefin-21, Bluefin Robotics (General Dynamics), США
- Echo Ranger, Boeing, США
- Echo Seeker, Boeing, США
- Echo Voyager, Boieng, США
- Gavia, Teledyne (создан в компании Harfmynd, Исландия), США
- Iver 2, OceanServer, США
- K-STER C
- Orca, Boeing, США
- Poseidon, США
- Minesniper MKIII, Kongsberg Defence Systems, Норвегия
- Mod 1 Swordfish, AUVAC, США
- REMUS 600-S, Kongsberg Maritime, Норвегия
- RHMS, Lockheed Martin, США
- Sand Shark, Bluefing Robotics (General Dynamics), США
- Seaeye Falcon, SAAB, Швеция
- Seaeye Panther Plus, SAAB, Швеция
- Seaeye Tiger, SAAB, Швеция
- Seafox, Atlas Elektronik, Германия
- Sea Glider
- Seascan
- Sea WASP, SAAB, Швеция
- Slocum
- Spray
- UFP (Upward Falling Payloads), DARPA, США
Германия
Atlas Elektronik, Германия
Seafox, Atlas Elektronik, Германия
Подводное телеуправляемое по оптоволоконному кабелю устройство для полуавтоматического уничтожения морских мин за счет самоподрыва. OSMDWS (One-Shot Mine Disposal Weapon System) - одноразовые системы для уничтожения мин.
Норвегия
Kongsberg Defence Systems, Норвегия
Minesniper MKIII, Kongsberg Defence Systems, Норвегия
Необитаемый подводный беспилотный аппарат - "камикадзе" для обнаружения мин и уничтожения их самоподрывом. OSMDWS (One-Shot Mine Disposal Weapon System) - одноразовые системы для уничтожения мин. Оснащен видеокамерой, сонаром и навигационной системой. Команду на подрыв выдает оператор. По результатам тестирования, приняты на вооружение ВМС Норвегии и НАТО в 2016 году.
REMUS 600-S, Kongsberg Maritime, Норвегия

Морской подводный автономный робот.
Подробнее на сайте /
2015.07 Remus-600 успешно запустили и возвратили на борт подводной лодки класса Вирджиния (SSN-784)
США
Anduril, США
XL-AUV

фото:
2022.11 Военный подрядчик Anduril подписал контракт на создание 3-тонных прототипов подводных беспилотников XL-AUV. Это аппараты универсального типа с автономией до 10 дней. Выпуск первой партии намечен на 2025 год. Доступные глубины - до 6000 м. Заказчик - ВМС Австралии. XL-AUV - это заполняемый водой аппарат с алюминиевым каркасом, в его кормовом отсеке - двигательная установка с батарейным питанием, в носовом отсеке - система навигации и управления, а основная часть аппарата - для полезной нагрузки. Аппарат проектируется с использованием технологий AUV Dive Technologies. Аппарат будет работать под управлением ОС Lattice и ИИ Anduril.
AUVAC, США
Mod 1 Swordfish, AUVAC, США
Аппараты в 2016 году задействованы на 5-м флоте ВМС США.
Boston Engineering, США
BioSwimmer (BILIS), Boston Engineering, США

Полуавтономный подводный необитаемый аппарат, основанный на бионических принципах движения. Развитие проектов GhostSwimmer и RoboTuna.
Bluefin Robotics (General Dynamics), США
Bluefin-21, Bluefin Robotics (General Dynamics), США
Подводный военный беспилотник "Голубой тунец". 4.9 м. Может запускать небольших подводных роботов Sand Sharks.
Sand Shark, Bluefing Robotics (General Dynamics), США
Подводный разведывательный робот. Запускается с борта подводного военного беспилотника Bluefin-21. Вес - 6.8 кг.
Boeing, США
Echo Ranger, Boeing, США
АНПА
Echo Seeker, Boeing, США
АНПА
Echo Voyager, Boieng, США

АНПА, 15.6 м, 50 тонн, может оставаться под водой несколько дней, и в автономном походе - до полугода (подзарядка от бортового дизель-генератора).
Orca, Boeing, США
Беспилотная субмарина класса XL UUV, то есть сверхбольшой подводный дрон. Orca (касатка), сравнительно бюджетная (в сравнении с обитаемыми подлодками) система, способная в теории заниматься выполнением различных миссий - от разведки до поражения кораблей противника. Модульная конструкция позволяет использовать различную полезную нагрузку. В частности, Orca может нести на борту сонар, легкую торпеду MK. 46, а при необходимости - тяжелую Mk. 48 или даже комплект противокорабельных ракет! Ориентировочная стоимость - порядка $10 млн.
HII Mission Technologies, США
2023.12 За 30 лет компания поставила более 600 UUV REMUS в 30 стран мира. Часть из этих устройств используются в гражданском или научном секторе.
REMUS-620, HII Mission Technologies, США
Морской подводный автономный робот.

Автономность - до 110 часов. Дальность хода (275 морских миль) 509 км. Рабочие глубины - до 600 м.
Несколько REMUS 620 для работы в составе роя могут быть развернуты с подводных лодок, небольших пилотируемых или беспилотных катеров, десантных кораблей, боевых надводных кораблей и вертолетов. Также этот АНПА можно использовать как платформу для запуска и управления другими беспилотными средствами или полезными нагрузками под водой.
Стандартная полезная нагрузка в виде сонара с синтетической апертурой может быть заменена или модифицирована в зависимости от задачи, исполняемой роботом, включая разведку, наблюдение, а также операции в области кибер- и радиоэлектронной борьбы.
Lockheed Martin, США
RHMS, Lockheed Martin, США

Система RHMS включает в себя многоцелевой автономный подводный аппарат RMMV Lockheed Martin, оборудованный сонаром бокового обзора Raytheon. Аппарат способен погружаться на небольшие глубины и вести поиск мин. Возможно решение и других задач, необходимых ВМС США. Это по-задумке. Все же разработка, которая идет более 10 лет, похоже, оказалась не слишком удачной. В ходе испытаний, которые были продлены, система слишком часто выходила из строя. Вместе с тем, она находила мины даже быстрее, чем того требовало техзадание.
2016.08.05 Подводная система RHMS, разработанная для ВМС США, оказалась неэффективной и ненадежной
Teledyne (создан в компании Harfmynd, Исландия), США
Gavia, Teledyne (создан в компании Harfmynd, Исландия), США
АНПА, созданный в Исландии компанией Hafmynd ehf. Создан до 2010 года. Использовался ВМФ РФ под названием "Гавиа". Закупался в РФ через ОАО "Тетис Про".
OceanServer, США
Iver 2, OceanServer, США
Разработан в 2005 году. Выпускался в различных модификациях: EP32, EP35, EP42, отличающихся мощностью аккумуляторной батареи и длиной корпуса. Закупался различными странами, включая Россию, Хорватию и т.п. в гражданских и военных целях. Базовая цена составляла $50 тысяч, с полной комплектацией (ГБО + система навигации по допплеровскому лагу) - порядка $150 тысяч. К 2009 году было продано более 100 комплексов на базе Iver 2.
Производитель неизвестен
Poseidon, США
Poseidon, подводный аналог системы глобальной навигации GPS, которая позволит подводным лодкам и АНПА обмениваться информацией между собой и с центрами управления. Как ожидается, ее испытания начнутся в 2018 году. Разрабатывается по заказу DARPA.
UFP (Upward Falling Payloads), DARPA, США
2016.05.18 Сообщается о разработке в DARPA подводной роботизированной капсулы, которая может содержать в качестве полезной нагрузки беспилотник, ракету или другое военное оборудование. Капсулы длиной порядка 4.5 м предназначены для размещения по всему пространству Мирового океана. Активировать спящую капсулу можно будет радиосигналом, получив который капсула всплывет на поверхность океана и высвободит полезную нагрузку. Бортовой БЛА капсулы может быть воздушным или с возможностью взлета и посадки с воды. DARPA уже испытала систему подъема капсулы со дна и систему связи. Как ожидается, агентство продолжит разработку и тестирование полезной нагрузки для капсулы.
Франция
ECA Group, Франция
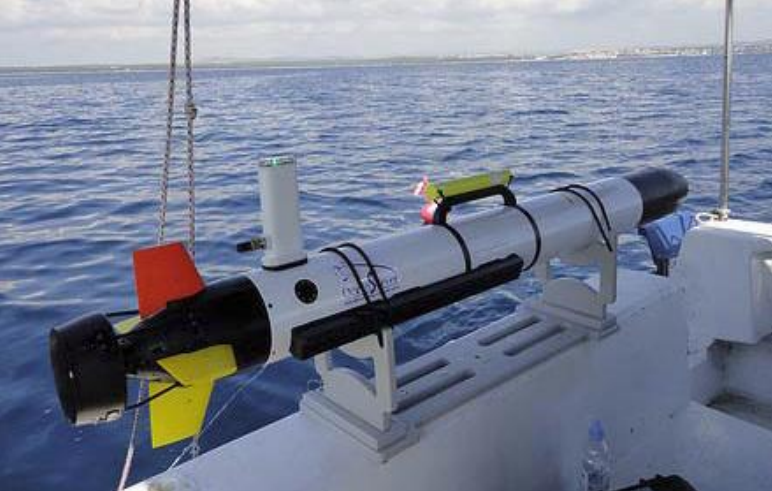
A9-M, ECA Group, Франция
подводный робот, предназначенный для картографирования морского дна, обследования входов на морские базы и поиска объектов в воде. Эти аппараты применяют, в частности, для обнаружения минных полей.
A27-M, ECA Group, Франция

источник фото: M.Denniel@Marine Nationale;
2016.04.29 . ECA Group показала возможности AUV A27-M - робота с длительным временем работы, предназначенного для операций по борьбе с подводным минированием. На сегодня это самый большой автономный подводный робот из семейства продуктов AUV производства французской компании ECA, предназначенных для противодействия минированию, способный к обнаружению, классификации и локализации мин. Время автономной работы - более 35 часов. Робот оснащен сонаром с управляемой апертурой и системой подводного запуска и приема на борт (LARS), что позволяет использовать систему в самых разных условиях на поверхности. Роботом управляет обновленное ПО UMIS, которое отвечает за движение UAV, за сбор и переработку данных.
Thales (и ряд других компаний), Франция
MMCM (Maritime Mine Counter Measures)
2020.08.09 Группа компаний, возглавляемая Thales, ведет разработку роботизированного комплекса противоминной борьбы. Новая система позволит вести траление на удалении 14-35 миль от корабля с экипажем.
В состав MMCM войдет 6 основных элементов. 12 метровый безэкипажный катер USV, дистанционно управляемая система нейтрализации мин MuMNS, автономные необитаемые подводные аппараты, буксируемая гидроакустическая станция, мобильный центр управления в двух 20-футовых морских контейнерах (может размещаться на корабле или на берегу). Система может обнаруживать похожие на мины предметы, их идентифицировать и подрывать зарядами, крепящимися на корпус мины. Все это в дистанционном режиме. Испытать комплекс планируют совместно Франция и Великобритания. /
Швеция
SAAB, Швеция
Seaeye Falcon, SAAB, Швеция

Seaeye Falcon, SAAB
Seaeye Panther Plus, SAAB, Швеция
В России известен также как Пантера Плюс, "локализованный" ОАО Тетис Про, Россия
ТНПА. Создан до 2013 года. Принят на вооружение ВМФ РФ, например, такой робот эксплуатирует судно "Коммуна", спасательное судно Черноморского флота.
Seaeye Tiger, SAAB, Швеция
Телеуправляемый подводный аппарат класса ROV семейства "Морской глаз" для наблюдений и инспектирования объектов.
Sea WASP, SAAB, Швеция
подводный дрон для обнаружения и первичного осмотра подводных взрывных устройств. WASP расшифровывается как Waterborne Aini-IED Security Platform. Дроном управляют 2 оператора по кабелю длиной до 500 футов. Достижимые глубины - до 200 футов. Длина робота 5.5 футов, вес около 200 фунтов. Оборудован передним сонаром, несколькими датчиками, необходимыми для измерения глубины и навигации. И двумя камерами - большой на передней части устройства и небольшой на "руке". Может спускаться на воду с причала или с пляжа, а также с различного типа надводных кораблей и резиновых лодок. Анонсирован в мае 2016 года /
Производитель и страна производства неизвестны
K-STER C
Одноразовый подводный робот - камикадзе, служащий для уничтожения морских мин путем их подрыва в воде. Головная часть робота - боевая часть с кумулятивным зарядом.
Sea Glider
подводный планер (глайдер)
Seascan
Подводный робот "точной идентификации". С помощью гидролокаторов и камер высокой четкости может определять размеры и тип объектов в воде. Радиус действия - до 2 км, глубина погружения - до 3000 м.
Slocum
подводный планер (глайдер)
Spray
подводный планер (глайдер)
Смотрите связанные статьи Robo-педии:
Смотрите связанные статьи Robo-педии:
Публикации по теме:
 18.06.2026 Подводный планер с ИИ как система для обнаружения подводных лодок
18.06.2026 Подводный планер с ИИ как система для обнаружения подводных лодок 24.08.2022 Anduril Australia построит 3 крупных АНПА для нужд флота страны
24.08.2022 Anduril Australia построит 3 крупных АНПА для нужд флота страны 23.02.2022 ВМС США готовят модульные АНПА для подводных атомоходов
23.02.2022 ВМС США готовят модульные АНПА для подводных атомоходов 29.07.2021 Английские моряки получат роботизированных “скатов”-разведчиков
29.07.2021 Английские моряки получат роботизированных “скатов”-разведчиков 23.07.2021 Robo-Shark: акула-наблюдатель на службе НОАК
23.07.2021 Robo-Shark: акула-наблюдатель на службе НОАК 15.02.2021 В США разрабатывают АНПА для длительных подводных походов
15.02.2021 В США разрабатывают АНПА для длительных подводных походов 21.02.2019 В США запускают проект беспилотной микросубмарины, которая может нести торпеды
21.02.2019 В США запускают проект беспилотной микросубмарины, которая может нести торпеды 27.07.2018 Китай развернет автономные подводные лодки в начале 2020-х годов
27.07.2018 Китай развернет автономные подводные лодки в начале 2020-х годов 30.06.2018 Американские подводные роботы научились действовать группой
30.06.2018 Американские подводные роботы научились действовать группой 18.06.2017 Самая большая автономная подлодка США Echo Voyager вышла в море
18.06.2017 Самая большая автономная подлодка США Echo Voyager вышла в море 21.02.2017 Подводный надувной двурукий манипулятор - от разминирования до ремонта
21.02.2017 Подводный надувной двурукий манипулятор - от разминирования до ремонта 20.12.2016 Автономная подлодка BOEING способна преодолеть 7,500 миль на одной зарядке
20.12.2016 Автономная подлодка BOEING способна преодолеть 7,500 миль на одной зарядке 19.12.2016 В Океанос говорят о разработке "уникального подводного глайдера"
19.12.2016 В Океанос говорят о разработке "уникального подводного глайдера" 08.12.2016 В России готовы начать развертывание системы подводного позиционирования
08.12.2016 В России готовы начать развертывание системы подводного позиционирования 29.10.2016 ВМС США планируют оснастить эсминцы типа "Арли Бёрк" подводными беспилотными планерами
29.10.2016 ВМС США планируют оснастить эсминцы типа "Арли Бёрк" подводными беспилотными планерами 05.08.2016 Подводная система RHMS, разработанная для ВМС США, оказалась неэффективной и ненадежной
05.08.2016 Подводная система RHMS, разработанная для ВМС США, оказалась неэффективной и ненадежной 02.07.2016 В сентябре можно будет посмотреть отечественные разработки военных роботов на форуме Армия-2016
02.07.2016 В сентябре можно будет посмотреть отечественные разработки военных роботов на форуме Армия-2016 19.05.2016 США разместят в Мировом Океане “спящие” капсулы с военными дронами
19.05.2016 США разместят в Мировом Океане “спящие” капсулы с военными дронами









